Desafíos 2026 Jamboree#
Desafío 1: Robot Shuffle#
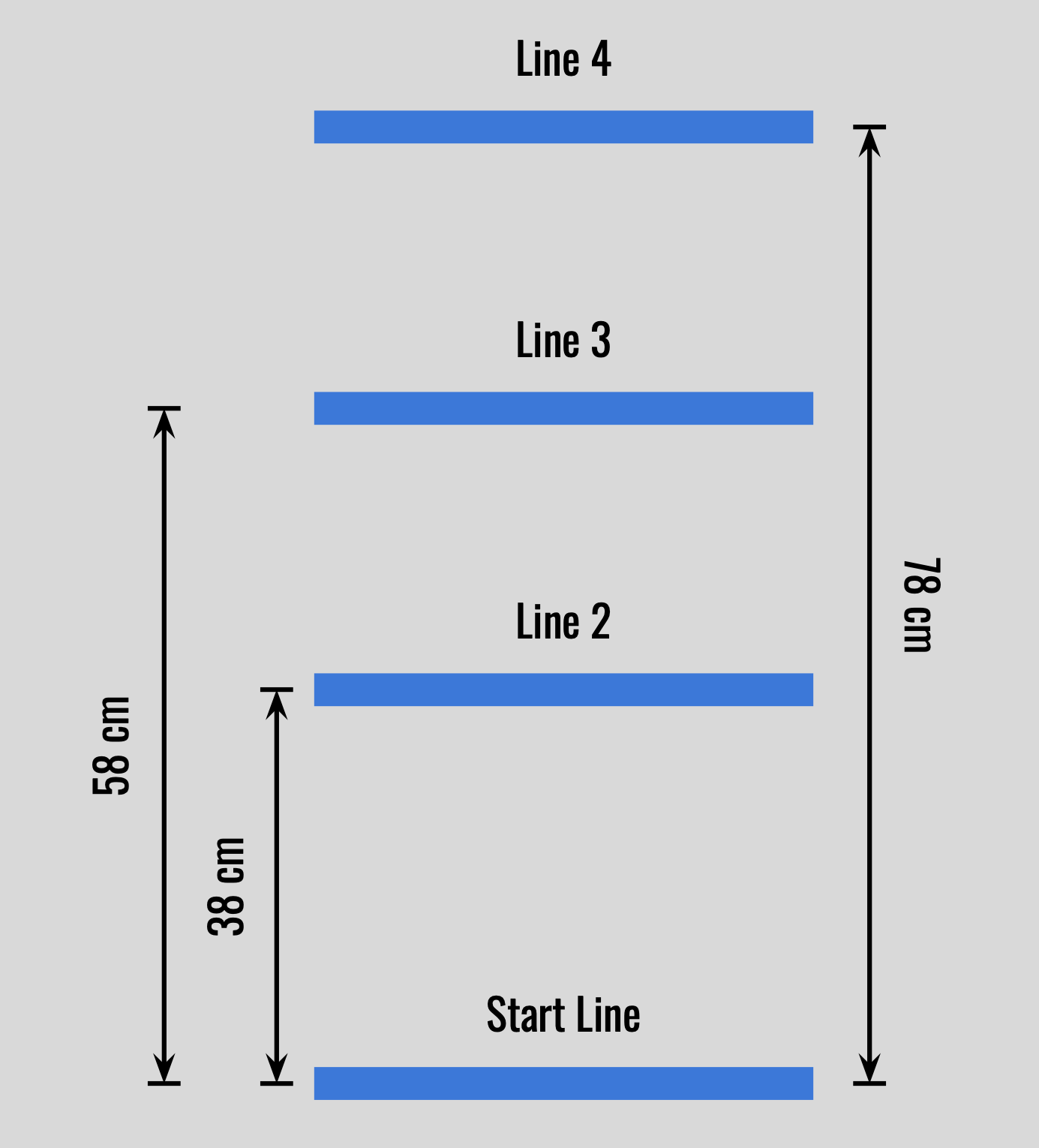
Este desafío pone a prueba las habilidades de programación necesarias para mover la Base de Conducción hacia adelante y hacia atrás. Para completar el desafío, la Base de Conducción debe desplazarse por el recorrido de la siguiente manera:
Moverse desde la Línea de Inicio hasta la Línea 4, a 78 cm de la Línea de Inicio, a una velocidad del 50%.
Esperar 2 segundos.
Moverse hasta la Línea 2, a 38 cm de la Línea de Inicio, a una velocidad del 25%.
Avanzar 20 cm hasta la Línea 3 a una velocidad del 75%.
Esperar 2 segundos.
Avanzar a una velocidad del 50% y detenerse en la Línea 4.
Esperar 2 segundos.
Retroceder a una velocidad del 75% y detenerse en la Línea de Inicio.
Mostrar una cara sonriente.
Note
La Base de Conducción debe ejecutar todos los pasos moviéndose únicamente hacia adelante y hacia atrás, y detenerse en la Línea de Inicio. Específicamente, las llantas de la Base de Conducción comenzarán en la Línea de Inicio y también deberán detenerse en la Línea de Inicio. Además, la Base de Conducción debe detenerse en las Líneas 2 a 4 al completar este desafío. Finalmente, no se proporcionan todas las ubicaciones de las líneas. Los pasos anteriores deben leerse cuidadosamente para interpretar dónde se encuentra cada línea en el recorrido.
Diagrama del campo – desafío 1#
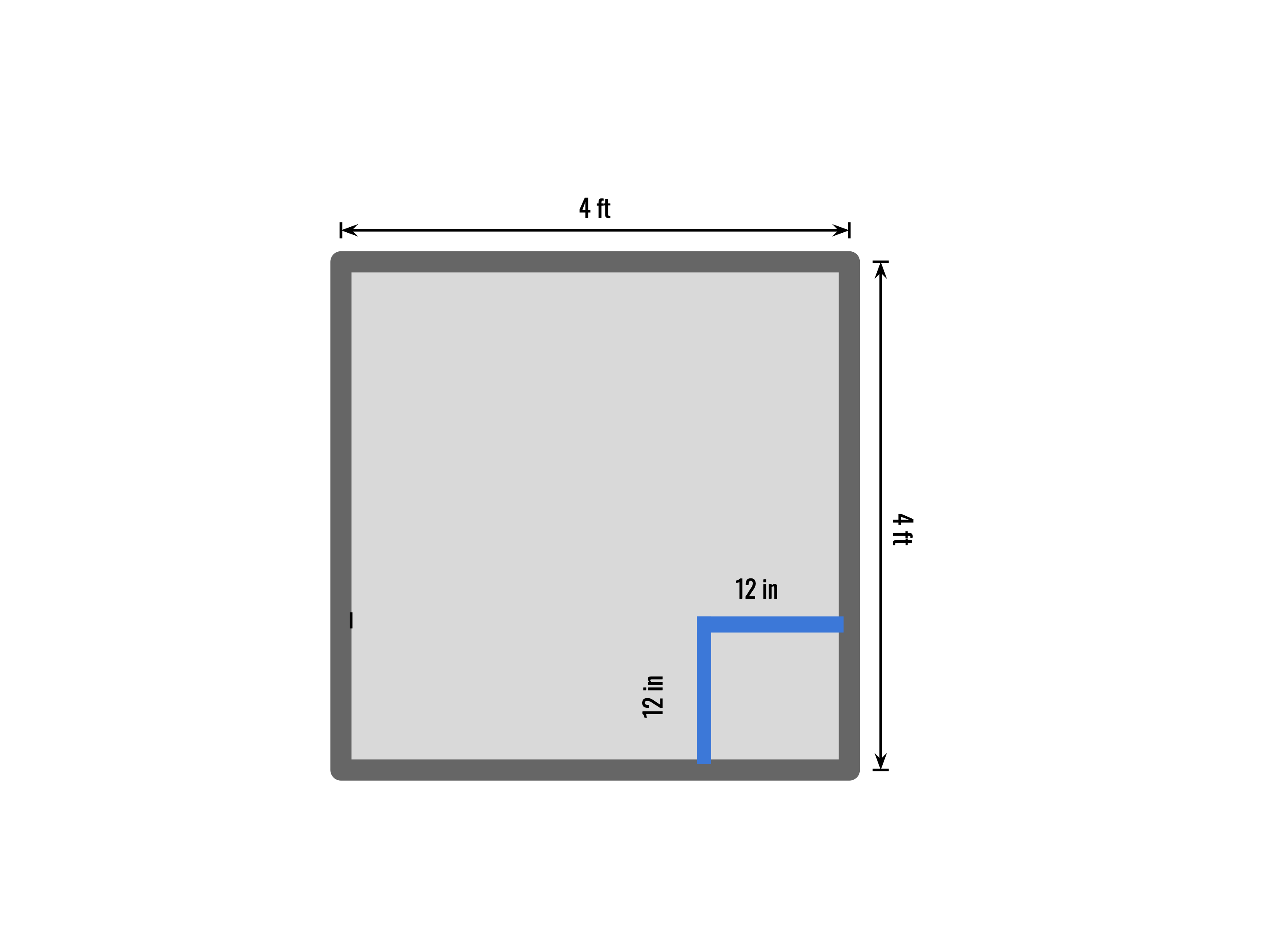
Desafío 2: Alrededor del Garaje#
Este desafío requiere que los estudiantes programen su Base de Conducción para moverse alrededor de un “garaje” (la caja del kit), poniendo a prueba su habilidad para hacer que la Base de Conducción gire con precisión. Para completar este reto, la Base de Conducción debe recorrer el circuito de la siguiente manera:
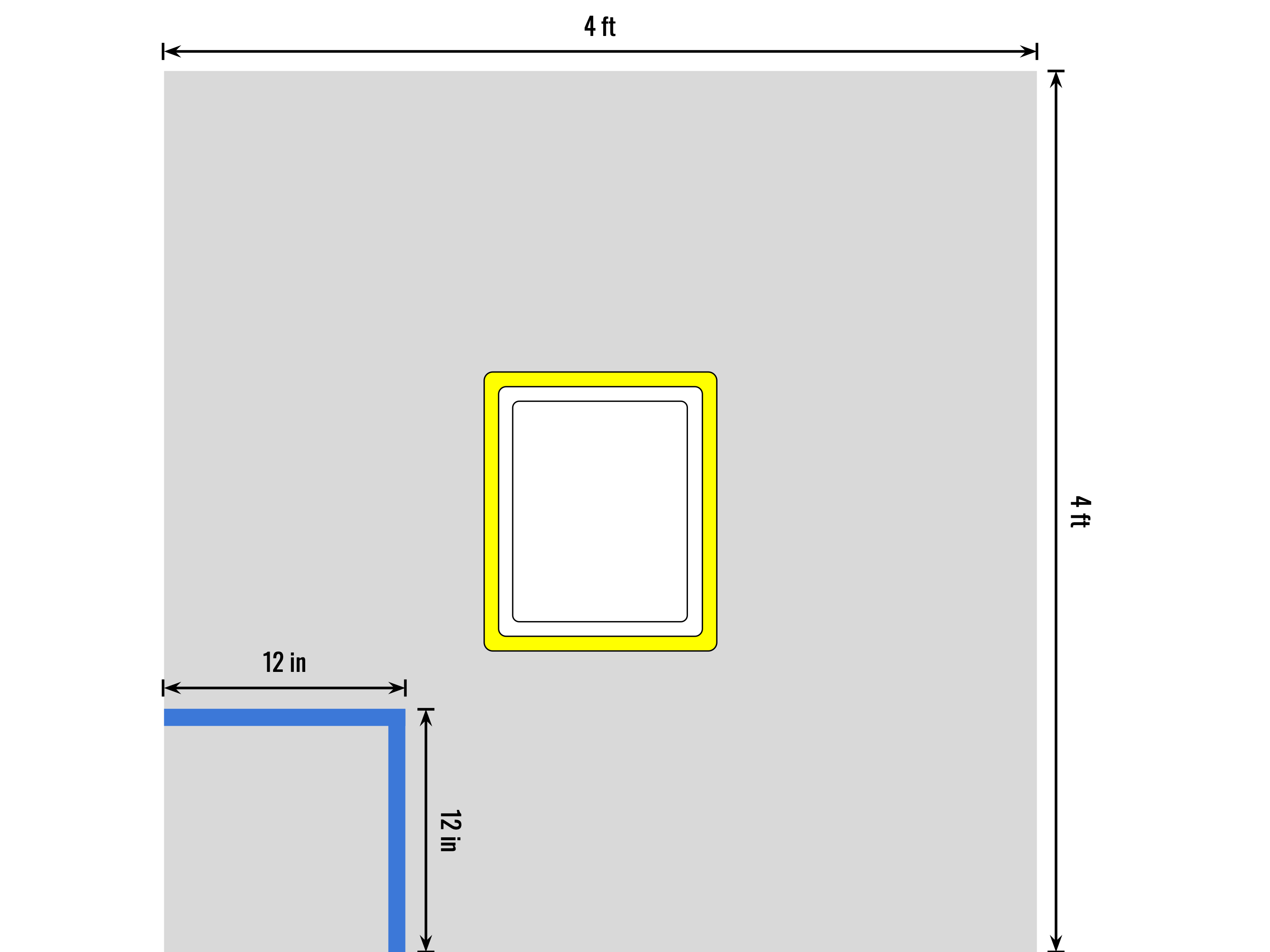
Se colocará una caja del kit en el centro de una mesa de 4 pies por 4 pies, con bordes elevados.
La caja del kit debe estar posicionada de modo que sus lados cortos queden más cerca de la parte superior e inferior de la mesa, y los lados largos más cerca de la izquierda y derecha.
Se colocará con cinta un cuadrado de 12” por 12” en la esquina inferior izquierda de la mesa, el cual servirá como punto de inicio para la Base de Conducción.
La Base de Conducción comenzará apuntando hacia la parte superior de la mesa.
Se debe programar la Base de Conducción para que rodee la caja del kit en dirección contraria a las agujas del reloj, y termine dentro del cuadrado de 12” por 12”, nuevamente apuntando hacia la parte superior de la mesa.
La Base de Conducción debe demostrar al menos dos tipos distintos de giro mientras se mueve alrededor de la caja del kit. Además, debe moverse en reversa por un lado de la caja al menos una vez.
Una vez que la Base de Conducción regrese al cuadrado de 12” por 12”, el Hub debe estar programado para mostrar una cara guiñando un ojo, señalando que el desafío fue completado.
Note
Ambas llantas deben terminar dentro del cuadrado marcado con cinta. Además, la Base de Conducción no puede tocar la caja del kit ni los bordes de la mesa mientras se mueve. Usa la figura del desafío como referencia para montar el circuito.
Diagrama del campo – desafío 2#
Desafío 3: Capturar los Fardos de Heno#
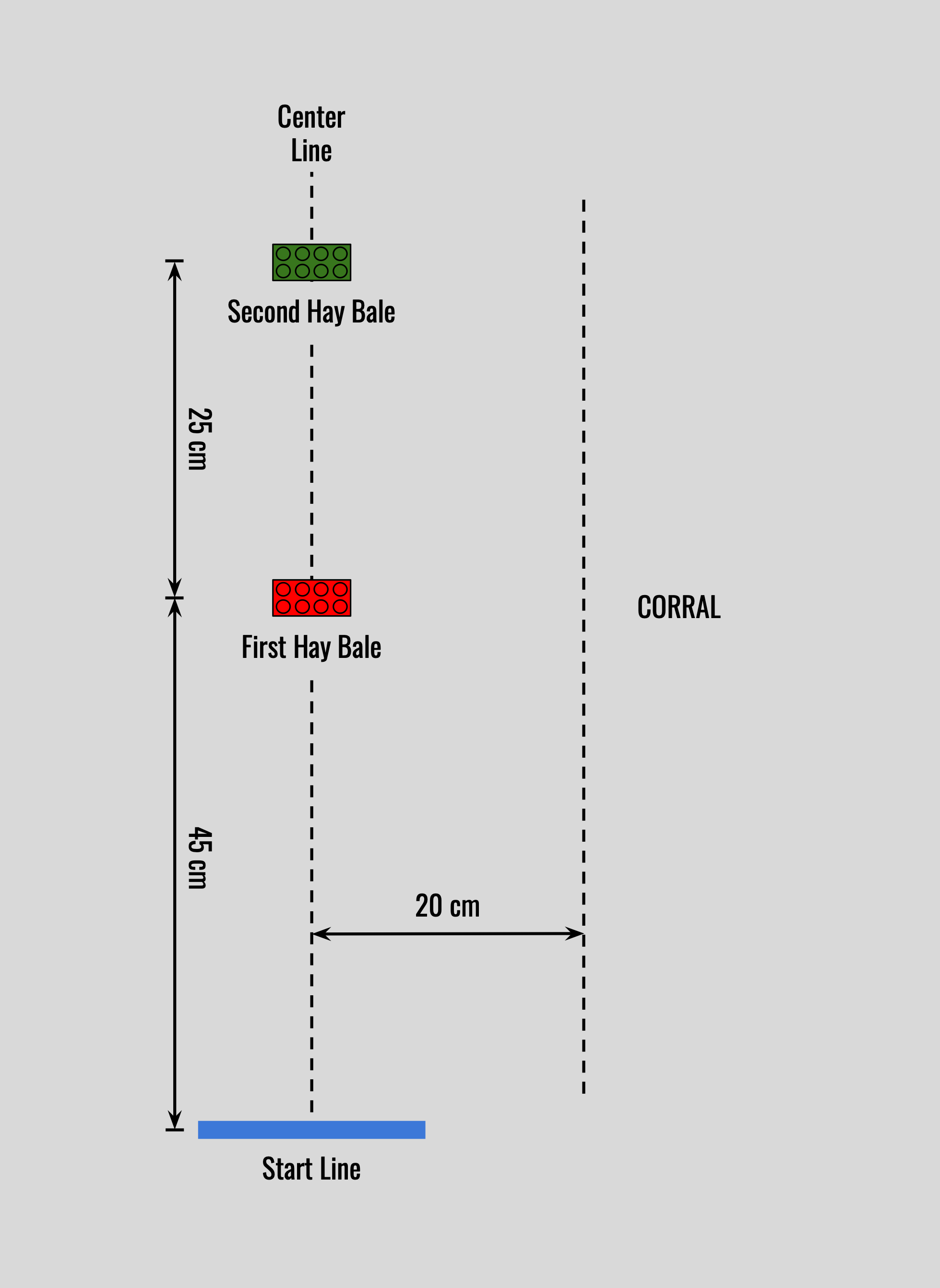
Este desafío utiliza un tercer motor para controlar un brazo y así poner a prueba la precisión y la habilidad del estudiante al programar. Los fardos de heno son dos ladrillos LEGO apilados del propio kit. Es fundamental que los estudiantes alineen correctamente la Base de Conducción con los fardos de heno para que pueda atraparlos y mover ambos sin intervención del estudiante.
Para completar este desafío, la Base de Conducción debe recorrer el circuito de la siguiente manera:
La Base de Conducción se coloca con sus llantas sobre la línea de inicio.
La Base de Conducción avanza y atrapa el primer fardo de heno, ubicado a 45 cm de la línea de inicio.
La Base de Conducción espera 2 segundos.
La Base de Conducción gira a la derecha y lleva el primer fardo de heno al corral, 20 cm desde la línea central.
La Base de Conducción espera 2 segundos.
La Base de Conducción regresa a la línea central.
La Base de Conducción avanza y atrapa el segundo fardo de heno, ubicado a 25 cm del primer fardo.
La Base de Conducción espera 2 segundos.
La Base de Conducción retrocede y coloca el segundo fardo de heno sobre la línea de inicio.
El brazo se levanta y el Hub muestra una carita feliz.
Note
La precisión es crucial en este desafío. Debido a que la velocidad influye, se recomienda usar velocidades del motor al 25%. Los estudiantes pueden modificar el brazo de su Base de Conducción para atrapar mejor los fardos de heno.
Diagrama del campo – desafío 3#
Desafío 4: Sensor Cuatro Cuadrados#
Este desafío es una prueba técnica para asegurarse de que los estudiantes comprendan cómo usar las funciones de los sensores del Driving Base. También utiliza un comando de bucle para que el robot se mueva de adelante hacia atrás hasta que un juez intervenga. Para completar el desafío, el Driving Base debe moverse por el recorrido de la siguiente manera:
Las llantas de la Base de Conducción se colocan en el centro de un cuadrado de 12” por 12” marcado con cinta, ubicado en la esquina inferior derecha de una mesa de 4’ por 4’ rodeada de paredes.
La Base de Conducción avanza hacia la pared superior de la mesa. Cuando el sensor de fuerza se presiona, la Base de Conducción retrocede 6”, luego espera 2 segundos.
Luego, la Base de Conducción gira 90 grados a la izquierda y avanza hasta quedar a 10” de la pared izquierda de la mesa.
La Base de Conducción gira 90 grados a la izquierda, avanza hacia la pared inferior de la mesa y retrocede 4” cuando el sensor de fuerza se presiona.
El Hub muestra una cara triste y la Base de Conducción espera 2 segundos.
La Base de Conducción gira 90 grados a la izquierda y avanza 10”, luego retrocede 10”, y repite este movimiento (hacia adelante y hacia atrás) hasta que el juez agita su mano frente al robot (a 6” o menos) y el robot se detiene.
El estudiante presiona el sensor de fuerza y, después de un retraso de cuatro segundos, el robot avanza hacia la pared derecha de la mesa.
Usando el sensor de color, cuando la Base de Conducción entra en el cuadrado de 12” por 12” marcado con cinta, gira 90 grados a la izquierda para quedar orientada hacia la pared superior. La Base de Conducción debe finalizar dentro del cuadrado marcado sin tocar la cinta.
Note
Se sugiere que los estudiantes colocen varillas LEGO en el sensor de fuerza para que el Driving Base no choque con la pared mientras el sensor detecta el contacto.
Diagrama del campo – desafío 4#
Desafío 5: ¡Tú lo Diseñas!#
Este es un desafío que será evaluado en tres partes: “Ejecución”, “Creatividad” y “Aplicación práctica”. Tu equipo diseñará su propio desafío para su robot. Cada área vale 5 puntos, para un total de 15 puntos.
Obtendrán puntos (5 en cada área) de la siguiente manera:
Ejecución – el robot hace lo que ustedes dicen que hará, y si lo hace, ¡obtienen 5 puntos!
Creatividad – el robot utiliza muchos de los aspectos de comportamiento que aprendieron (por ejemplo, número de giros, número de sensores utilizados, etc.). No lo hagan demasiado complicado, pero traten de demostrar que comprenden varios de los comportamientos y sensores que se utilizaron en los desafíos 1 al 4. Seremos flexibles aquí… pero demuestren que sus estudiantes entienden los comportamientos básicos: dos tipos de giros, diferentes velocidades, un par de sensores usados durante el recorrido… ya saben a qué nos referimos.
Aplicación práctica – Hagan que sus estudiantes describan qué está haciendo el robot como si se utilizara en una aplicación real (por ejemplo, arrear ganado y moverlo a un potrero, perseguir a su maestro favorito hasta encerrarlo en un baño, recoger material reciclable y llevarlo a un área de reciclaje, un tranvía de zoológico, etc.).
Lo que esperamos es que el equipo traiga consigo un breve párrafo que describa la aplicación práctica, los comportamientos, movimientos y sensores que se utilizan, y luego demuestre su robot en el campo de juego. Pueden traer su propio campo de juego y cinta si lo desean, siempre que pueda retirarse fácilmente y no deje marcas. Su campo de juego debe caber dentro de nuestra mesa de juego de 4 ft x 8 ft (las que usamos típicamente en el jamboree). También pueden traer cualquier otro accesorio que deseen utilizar, siempre que sea apropiado para lo que estamos haciendo y que pueda montarse y desmontarse fácilmente para no crear congestión. Nosotros proporcionaremos la mesa de 4 ft x 8 ft para la demostración, o también pueden hacerlo en el piso.
Ahora, por favor, ¡diviértanse y sorprendan a los jueces con su creatividad! ¡Buena suerte!
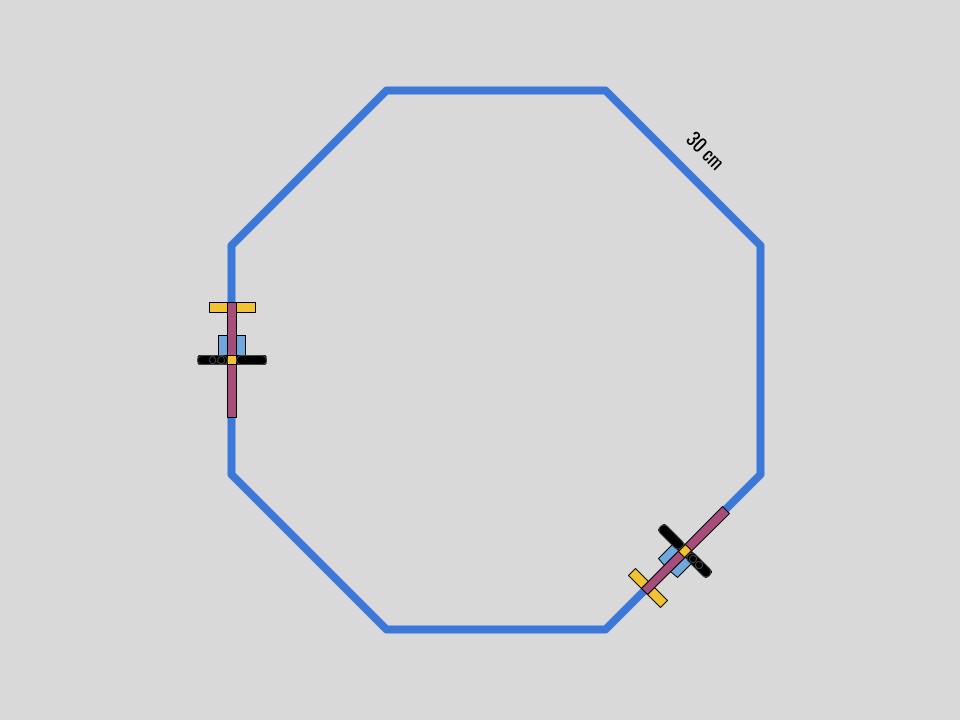
Desafío 6: Seguidor de Líneas#
Este desafío requiere que los estudiantes apliquen un programa básico de seguidor de líneas para maniobrar alrededor de un diseño octagonal con lados de 30 cm, con dos paradas aleatorias. Para completar este desafío:
El robot sigue los ocho lados del diseño octagonal de 30 cm y termina donde comenzó. El robot puede iniciar en cualquier punto del recorrido. Nota: se utilizará cinta azul de pintor para el diseño del recorrido.
Dos “postes del sensor de distancia” serán colocados aleatoriamente en el recorrido por el juez. Cuando el robot se acerque a menos de 15 cm de un poste, el robot se detendrá. El juez retirará entonces el poste y el estudiante podrá reiniciar el robot para continuar su recorrido.
El robot puede comenzar en cualquier punto del recorrido, pero debe detenerse a no más de 5 cm de su punto de inicio después de completar todo el recorrido.
Note
El robot completa el desafío moviéndose a lo largo del recorrido y puede seguir el interior o el exterior del diseño. Las escuelas participantes pueden traer su propio recorrido, si así lo desean, sujeto a la aprobación de los jueces.
Diagrama del campo – desafío 6#
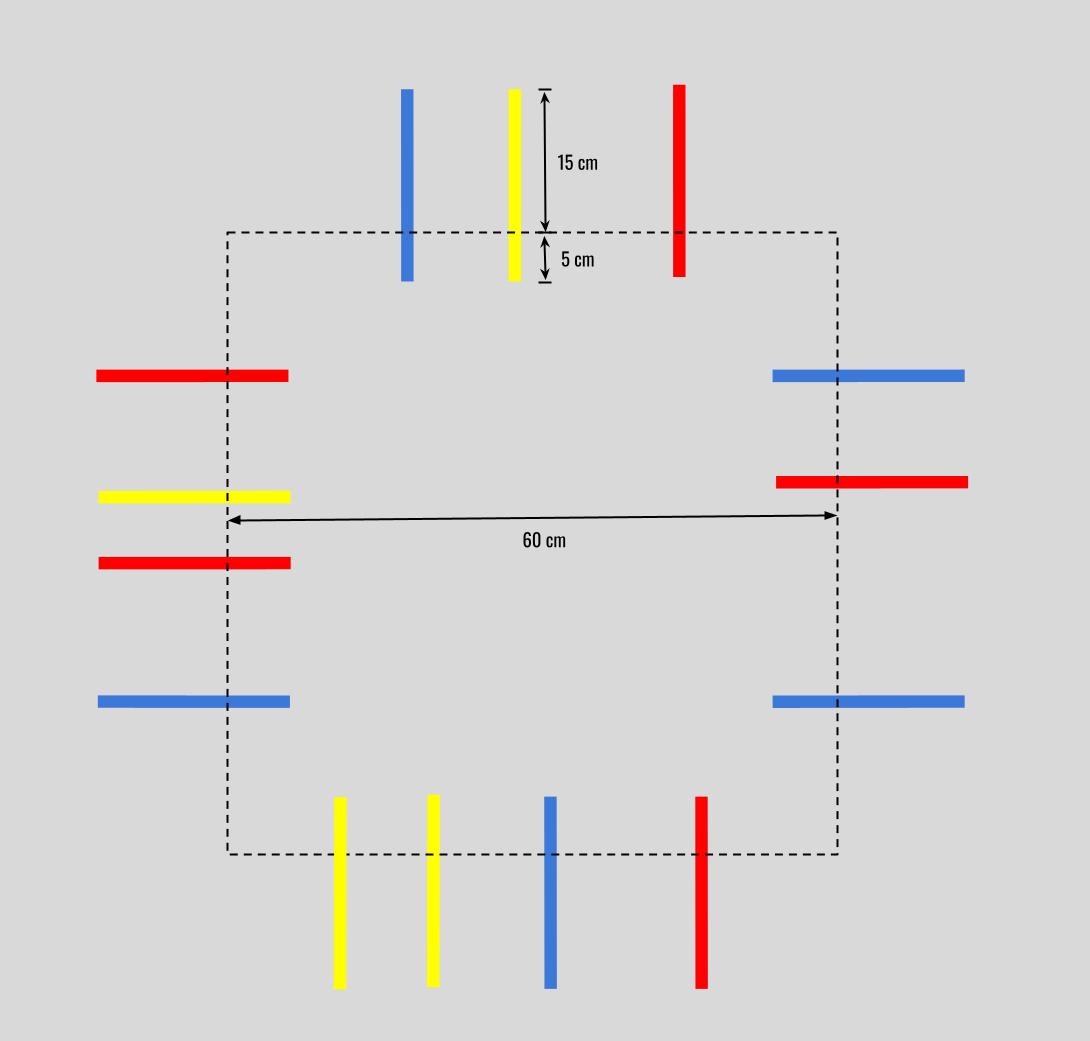
Desafío 7: Contador de Líneas#
Este desafío requiere que los estudiantes tomen datos del Sensor de Color, los almacenen en variables y los utilicen para iluminar la matriz de luces. Para completar este desafío, la Base de Conducción debe desplazarse por el recorrido de la siguiente manera:
La Base de Conducción se mueve a lo largo de un recorrido cuadrado de 60 cm sin usar el Sensor de Color.
En intervalos variables, se colocan aleatoriamente líneas azules, rojas y amarillas de 20 cm de largo (cinta vinílica eléctrica 3M) perpendiculares a la dirección de movimiento de la Base de Conducción. Estas se extienden 5 cm hacia el interior del recorrido y 15 cm hacia el exterior.
Hay un mínimo de 10 cm entre cada línea de color. Cuando el Sensor de Color detecta una línea de color, el Botón de Encendido cambia al color de la línea y el programa lleva la cuenta de cuántas líneas rojas, amarillas y azules se detectan.
El juez mueve su mano a menos de 15 cm del Sensor de Distancia y la Base de Conducción se detiene.
El Botón de Encendido se vuelve rojo y la matriz de luces muestra “ROJO”.
La matriz de luces muestra el número de líneas rojas detectadas.
El Botón de Encendido se vuelve amarillo y la matriz de luces muestra “AMARILLO”.
La matriz de luces muestra el número de líneas amarillas detectadas.
El Botón de Encendido se vuelve azul y la matriz de luces muestra “AZUL”.
La matriz de luces muestra el número de líneas azules detectadas.
Diagrama del campo – desafío 7#
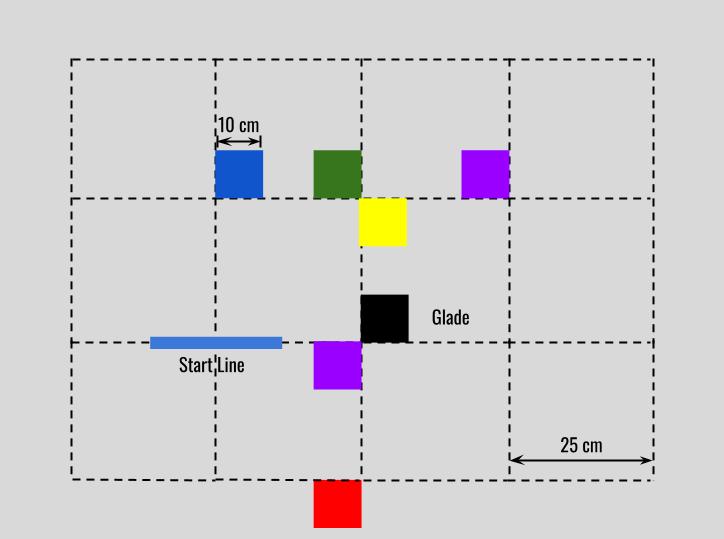
Desafío 8: Corredor de Laberinto#
Este desafío requiere que los estudiantes utilicen un bucle para ejecutar comandos en “marcadores” dispuestos aleatoriamente y navegar a través de un laberinto para llegar a la seguridad del “claro”. Para completar este desafío, la Base de Conducción debe desplazarse por el recorrido de la siguiente manera:
Entre cuatro y once marcadores de colores se disponen en una cuadrícula de 25 cm sobre una mesa de 4’ por 8’, y deben ser detectados antes de llegar al claro y finalizar el desafío.
Los marcadores son de 10 cm por 10 cm y están coloreados en rojo, negro, Azul Lunar, Verde Gamma, Fucsia Fireball y Amarillo Solar. El papel de color utilizado para los marcadores está disponible en Office Max. Se utiliza cinta vinílica eléctrica roja 3M #35 para los marcadores rojos.
Desde la línea de inicio, la Base de Conducción avanza 25 cm hasta el primer marcador y ejecuta los siguientes comandos en cada marcador:
Giro de 90 grados a la derecha en el lugar en los marcadores azules
Giro de 90 grados a la izquierda en el lugar en los marcadores verdes
Sin giro en los marcadores violetas (Fucsia Fireball)
Giro de 180 grados en el lugar y retroceder 25 cm en los marcadores amarillos
Giro de 180 grados en el lugar en los marcadores rojos
Detenerse en el marcador negro (claro)
Después de que la Base de Conducción detecta cada marcador, el color del Botón de Encendido cambia para coincidir con el marcador. La Base de Conducción ejecuta el comando de giro correcto y avanza 25 cm hasta el siguiente marcador.
Cuando la Base de Conducción llega al marcador negro, o claro, se detiene, el color del Botón de Encendido cambia a naranja y la matriz de luces muestra “CLARO”.
Note
El juez puede reorganizar aleatoriamente la disposición de los marcadores, y por lo tanto el diseño del laberinto, durante el Jamboree. Los estudiantes pueden ajustar ligeramente su Base de Conducción mientras se desplaza de marcador en marcador para asegurar que el Sensor de Color pueda detectar el siguiente marcador.
Diagrama del campo – desafío#
Desafío 9: Carreras de Resistencia#
En este desafío, la Base de Conducción completa un ejercicio de acondicionamiento popular en una cancha de baloncesto. Además de emplear un bucle de repetición, crear variables y usar al menos dos pilas de programación, una versión del programa utiliza variables integradas en un operador. Hace referencia a una lista de líneas donde el robot girará. Para completar este desafío, la Base de Conducción debe desplazarse por el recorrido de la siguiente manera:
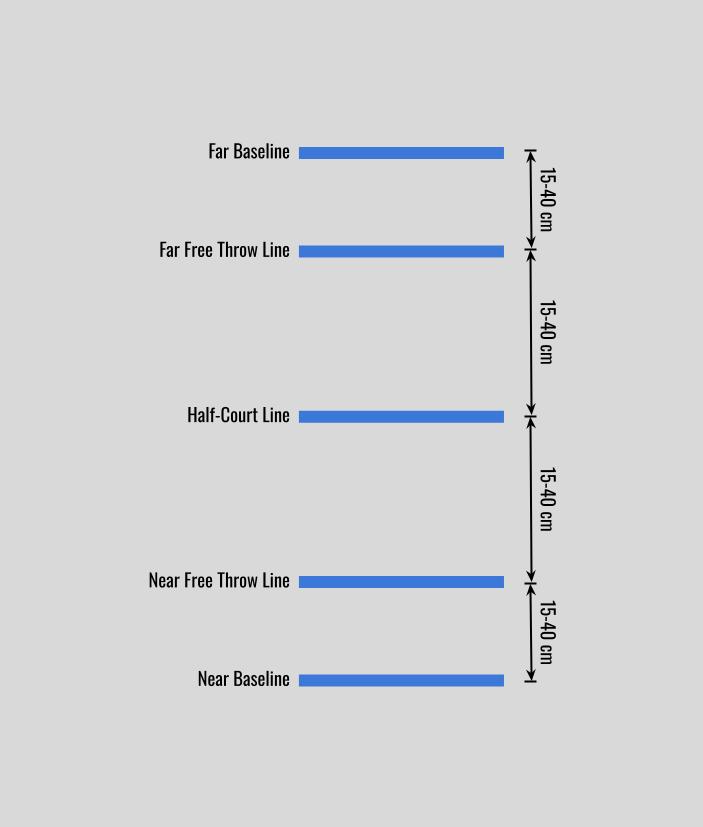
Las llantas de la Base de Conducción se colocan sobre la línea de fondo (línea 1) en una mesa de 4’ por 8’ rodeada de paredes.
La Base de Conducción avanza hacia la línea de tiro libre cercana (línea 2), toca el suelo y gira (sube y baja el brazo) cuando se detecta la línea, regresa a la línea de fondo cercana (línea 1), toca el suelo y gira.
La Base de Conducción avanza hasta la línea central (línea 3), toca el suelo y gira cuando se detecta la línea, y regresa a la línea de fondo cercana (línea 1).
La Base de Conducción toca el suelo y gira en la línea de fondo cercana (línea 1) y avanza hasta la línea de fondo lejana (línea 5), luego a la línea de tiro libre lejana (línea 4) y nuevamente a la línea de fondo lejana (línea 5), luego a la línea central (línea 3), luego a la línea de fondo lejana (línea 5) y finalmente a la línea de fondo cercana (línea 1), tocando el suelo y girando en cada línea.
Las líneas 1 a la 5 estarán espaciadas a intervalos irregulares que van de 15 cm a 40 cm.
Cada vez que la Base de Conducción detecta una línea, el conteo de líneas aumenta y este número se muestra en la pantalla del Hub.
Cuando la Base de Conducción regresa a la línea de fondo cercana por última vez, se detiene y muestra “¡Estoy cansado y confundido!”.
Diagrama del campo – desafío#
Desafío 10: Búsqueda y Rescate#
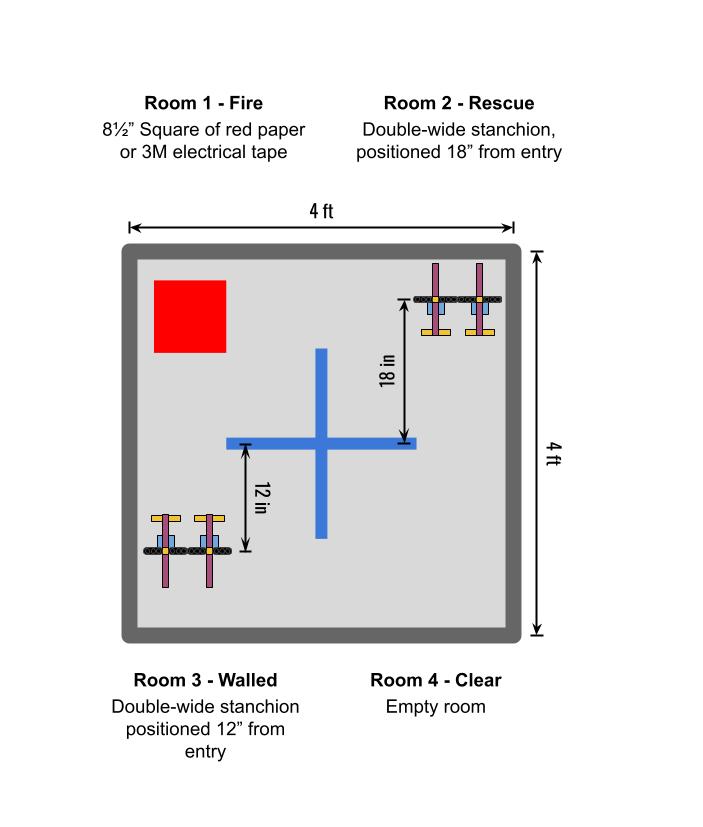
En este desafío, programarás la Base de Conducción para navegar un edificio de 4 habitaciones. La Base de Conducción debe realizar 4 acciones únicas para 4 habitaciones únicas, las cuales se presentarán en orden aleatorio para simular un área peligrosa donde las condiciones son desconocidas. La Base de Conducción debe completar tareas en las 4 habitaciones y regresar al punto de inicio. Cada habitación tendrá el mismo tamaño y estará dispuesta en un tablero de juego de 4’ x 4’. La salida de cada habitación servirá como la entrada de la siguiente habitación.
Objetivos de las habitaciones:
Fuego: El Botón de Encendido se vuelve rojo, la Base de Conducción pasa sobre el fuego y sale de la habitación. Rescate: La Base de Conducción toca el suelo cerca del poste (sube y baja el brazo) y sale de la habitación. Con Paredes: La Base de Conducción evita la pared y sale de la habitación. Despejada: La Base de Conducción escribe “Analizar” en la pantalla de luces y sale de la habitación.
Cómo programar el desafío:
Determinar cómo se puede identificar cada una de las cuatro habitaciones utilizando sensores.
Usar comandos if-then y/o if-then-else para completar la tarea de cada habitación y organizarlos en una secuencia que complete correctamente todas las tareas, sin importar qué habitación se presente primero.
Ajustar finamente los giros y las distancias de desplazamiento para que la Base de Conducción salga de cada habitación en una posición consistente para navegar hacia la siguiente.
Note
Utiliza un solo programa que recorra las 4 habitaciones.
Puede ser necesario anidar uno o más comandos if-then-else o if-then dentro de otro comando if-then-else para completar el desafío.
El juez determinará cuál habitación será la primera.
Los postes se colocarán para que la Base de Conducción se desplace en sentido antihorario alrededor del tablero de juego.
Diagrama del campo – desafío#